| To locate a point in our
three dimensional space we need coordinates, which we choose (by
long-standing convention) to be x, y and z, measured from an origin
located at some convenient point that we label (0,0,0) - that is, x = 0, y
= 0 and z = 0. We make sure our coordinate system is orthogonal. By that I
mean that each of the three axes (x, y, z) are at right angles to the
others. The reason for this becomes obvious when you notice that as you
move along any one of these axes your position along the other two remains
fixed. This allows us to isolate motion along one axis from the others - a
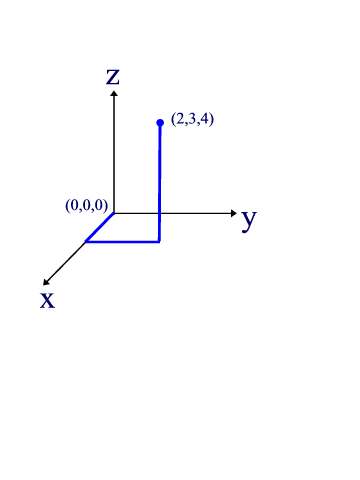
useful trick that can greatly simplify our study of motion. I've drawn
such a system to the right. In the picture the origin is labeled
(0,0,0), and I have put a point at (2,3,4). To get to this point, move 2
units along x, 3 along y, and 4 along z. Of course, you can get to this
point more directly by taking a straight line to (2,3,4), but to do so
violates a well known law of physics - "keep it simple". While
the path shown is clearly longer, it avoids the complexity of having more
that one coordinate change at a time.
The coordinate system shown is a
rectangular (or rectilinear, or Cartesian)
system. Other coordinate systems, always orthogonal, are circular,
cylindrical, elliptical, hyperbolic, and about a dozen more.
Note that the system is right
handed, in the following way: Point the fingers of your right hand
along the x-axis, and curl them so they point along y. Your thumb then
points along z. This is the right hand rule, an arbitrary but universal
convention for defining coordinate systems. Screws and Bolts with right
hand threads (which almost all of them have) also follow this convention.
|
 |